使用超音波感應器 | 樂高機器人EV3使用說明
使用超音波感應器
 |
超音波感應器可以測量與前方物體之間的距離。實現方式是發送出聲波並測量聲音反射回感應器所需的時間長度。聲音頻率太高,您無法聽見(“超音波”)。 可以按英寸或厘米爲單位測量與對象之間的距離。例如,可以使用此感應器使機器人在距離牆壁的特定距離處停止。 還可以使用超音波感應器檢測附近的其他超音波感應器是否正在運行。例如,可以使用此感應器檢測附近是否存在正使用超音波感應器的其他機器人。在此“僅偵聽”模式中,感應器會偵聽聲音信號,但是不發送這些信號。 |
| 資料 | 類型 | 範圍 | 備註 |
|---|---|---|---|
| 距離(厘米) | 數字 | 0 至 255 | 與對象之間的距離(以厘米爲單位)。 |
| 距離(英寸) | 數字 | 0 至 100 | 與對象之間的距離(以英寸爲單位)。 |
| 檢測到超音波 | 邏輯 | 是/否 | 如果檢測到其他超音波感應器,則爲“是”。 |
提示和技巧
| • | 超音波感應器最適用於檢測具有可良好反射聲音的硬表面的物體。軟物體(如布)可能會吸收聲波,而不會被檢測到。具有圓形或有角表面的物體也較難以檢測到。 |
| • | 該感應器無法檢測非常接近於感應器(大約 3 厘米或 1.5 英寸以內)的物體。 |
| • | 該感應器具有較寬“視野”,可以檢測靠近側面的較近物體,而不是直線前方的較遠物體。 |
範例 1:在牆壁之前的特定距離處停止

此程式使機器人向前驅動,直至超音波感應器檢測到 10 英寸以記憶體在物體,隨後機器人停止。此程式使用“超音波感應器 - 比較 - 距離(英寸)”模式的等待方塊等待檢測到的距離小於 10 英寸。如果超音波感應器朝向前方,則機器人會在牆壁之前大約 10 英寸處停止。
提示和技巧
當需要在等待感應器期間驅動時,請記住使用移動轉向方塊的“開啓”模式。
範例 2:在附近檢測到物體時發出警報
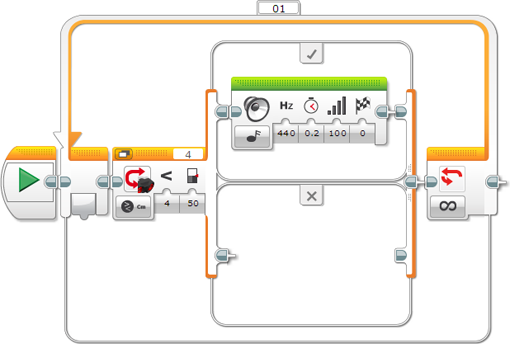
只要超音波感應器檢測到 50 厘米以內的物體,此程式便讓機器人發出聲音。此程式將選擇與“超音波感應器 - 比較 - 距離(厘米)”模式一起使用以測試檢測到的距離是否小於 50 厘米。如果是這樣,則選擇會播放音調。選擇在迴圈中重覆執行,以便持續重覆進行測試。
提示和技巧
當運行此程式時,嘗試在感應器前方四處移動物體以實驗感應器“視野”的寬廣程度。
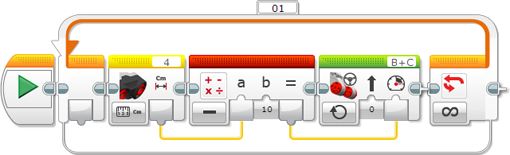
範例 3:在達到物體之前逐漸減速
提示和技巧
還可以嘗試在此程式運行期間移動物體。機器人會持續調整其速度。
| 方塊 | 模式 | 用途 |
|---|---|---|
| 等待 | 超音波感應器 - 比較 - 距離 | 等待距離達到特定值。 |
| 等待 | 超音波感應器 - 比較 - 存在 | 在“僅偵聽”模式中等待檢測到超音波信號。 |
| 等待 | 超音波感應器 - 更改 - 距離 | 等待距離按特定量更改。 |
| 迴圈 | 超音波感應器 - 比較 - 距離 | 重覆方塊序列,直至距離達到特定值。 |
| 迴圈 | 超音波感應器 - 比較 - 存在 | 在“僅偵聽”模式中重覆方塊序列,直至檢測到超音波信號。 |
| 迴圈 | 超音波感應器 - 更改 - 距離 | 重覆方塊序列,直至距離按特定量更改。 |
| 選擇 | 超音波感應器 - 比較 - 距離 | 根據距離在兩個方塊序列之間進行選擇。 |
| 選擇 | 超音波感應器 - 比較 - 存在 | 基於是否在“僅偵聽”模式中檢測到超音波信號,在兩個方塊序列之間進行選擇。 |
| 超音波感應器 | 測量 - 距離 | 測量距離並通過數字資料線獲取結果。 |
| 超音波感應器 | 測量 - 存在 | 在“僅偵聽”模式中偵聽其他超音波信號,並通過邏輯資料線獲取結果。 |
| 超音波感應器 | 比較 - 距離 | 將距離與預設值進行比較,並通過邏輯資料線獲取結果。 |
| 超音波感應器 | 比較 - 存在 | 在“僅偵聽”模式中偵聽其他超音波信號,並通過邏輯資料線獲取結果。 |
| 超音波感應器 | 高級 | 類似於“測量 - 距離”,但是具有僅發出單個聲音脈沖的選項。 |
| 資料記錄 | 請參考“資料記錄”。 |