移動轉向方塊 | 樂高機器人EV3使用說明
移動轉向方塊
 |
移動轉向方塊可以使機器人向前、向後驅動、轉彎或停止。可以調整轉向以使機器人直行、弧形驅動或急轉彎。 可對具有兩個大型馬達的機器人車輛使用移動轉向方塊(一個馬達驅動車輛左側,另一個驅動右側)。移動轉向方塊會同時控制兩個馬達,以便按所選方向驅動車輛。 |
提示和技巧
還可以通過移動坦克方塊控制具有兩個驅動馬達的機器人車輛。移動坦克方塊與移動轉向方塊類似,但是具有不同的轉向控制方式。
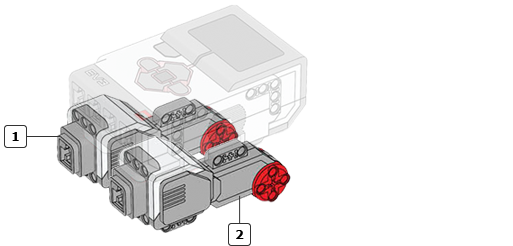
使用方塊頂部的連接埠選擇可選擇希望移動轉向方塊控制的兩個馬達(A、B、C 或 D)。單擊每個馬達字母可爲該馬達選擇連接埠。第一個連接埠應是車輛左側的馬達,第二個連接埠應是右側的馬達。
提示和技巧
確保在使機器人面朝“前方”的情況下,左側的馬達是連接埠選擇上列出的第一個馬達。否則,機器人會以錯誤方向轉彎。
範例

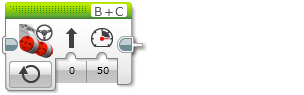
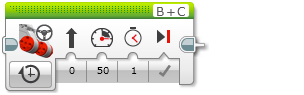
當希望程式中的其他方塊控制馬達保持開啓狀態的時間長度時可使用“開啓”模式。在此程式中,機器人向前驅動。當壓下了觸碰感應器時,機器人會停止。

範例
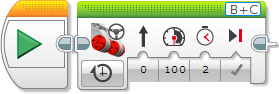
此程式會使機器人以完整功率向前直線驅動 2 秒,然後停止。
提示和技巧
可以在秒數輸入中使用小數點獲取精確時間量,如用於三秒半的 3.5 秒以及用於四分之一秒的 0.25 秒。
範例 1
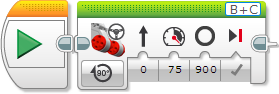
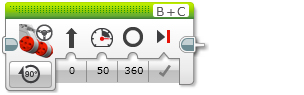
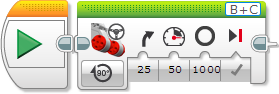
下面的程式會使機器人以 75% 功率向前直線驅動,直到兩個馬達轉動了 900 度(兩圈半),然後停止。
提示和技巧
機器人將行進的距離取決於度數輸入。但是,該距離還取決於使用的驅動輪直徑及其他物理因素。馬達中的內部轉動感應器會測量馬達輪框處的圈數。
提示和技巧
請注意,度數輸入測量的是較快馬達的馬達位置量,而不是轉彎時的機器人方向變化。機器人的方向變化取決於輪直徑、輪間距和其他因素。


提示和技巧
提示和技巧
馬達的旋轉速度與指定功率級別大致成比例,儘管旋轉速度也受馬達所承受的負載量影響。
轉向輸入接受介於 -100 至 100 之間的數字。值 0(零)使機器人直線驅動。正數(大於零)使機器人向右轉,負數使機器人向左轉。轉向值與零偏差越大,轉向越急。
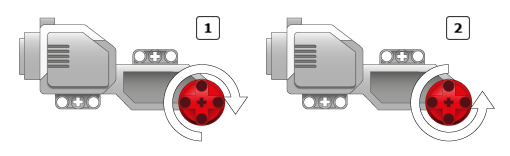
移動轉向方塊通過以不同速度運行兩個馬達來使機器人轉向。對於非常急的轉向,其中一個馬達會反向。
移動轉向方塊通過以不同速度運行兩個馬達來使機器人轉向。對於非常急的轉向,其中一個馬達會反向。
提示和技巧
要直接控制兩個馬達使用的功率級別,可以使用移動坦克方塊而不是移動轉向方塊。
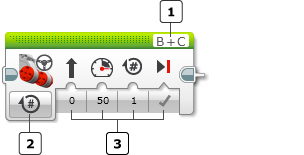
移動轉向方塊的輸入控制著具體的馬達運行方式。可以將輸入值直接輸入到方塊中。或者,可以通過資料線從其他程式方塊的輸出提供值。可用輸入及其功能取決於選擇的控制模式。