使用紅外線感應器“近程”模式 | 樂高機器人EV3使用說明
使用紅外線感應器“近程”模式

在“近程”模式中,紅外線感應器發送出紅外信號,可以檢測感應器前方物體對此信號的反射。反射信號的強度可以用於估計物體的接近程度(距離)。例如,可以使用“近程”模式檢測機器人接近牆壁的情況。
提示和技巧
| • | 近程值不直接對應於特定距離。該值取決於感應器前方物體的顔色和材料及其他因素。 |
| • | 紅外線感應器無法檢測非常接近於感應器(大約 1 厘米或半英寸以內)的物體的近程。 |
| • | 紅外線感應器的“訊號”模式也提供近程資料,但是只用於檢測與 IR 訊號之間的接近程度。有關更多資訊,請參考使用紅外線感應器“訊號”模式。 |
範例 1:在到達牆壁之前停止驅動

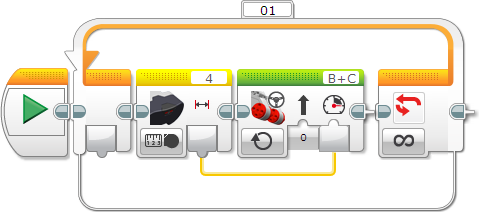
此程式會使機器人向前驅動,直至紅外線感應器檢測到它接近於牆壁或其他物體。在驅動開始之後,此程式使用“紅外線感應器 - 比較 - 近程”模式的等待方塊等待近程小於 35,然後停止機器人。
提示和技巧
機器人在到達物體之前停止的距離在很大程度上取決於物體的顔色。這是因爲淺色物體對(紅外)光的反射能力好於深色物體。
提示和技巧
當需要在等待感應器期間驅動時,請記住使用移動轉向方塊的“開啓”模式。
範例 2:在接近牆壁時減速