家長登入
報名專線
教育理念
教育理念
學習地圖
文章分享
課程列表
樂高動力機械SPM
6+
樂高創意程式BOOST
7+
樂高科技機器人EV3
9+
Scratch遊戲程式設計
8+
Python程式設計
11+
C++程式設計
12+
最新課表
2023夏令營
班
學生作品
聯絡我們
大拇指粉絲團
X
訂閱課程訊息
Email:
聯絡我們
請您向大拇指按讚!
我們會用大拇指多鼓勵孩子
地址:台北市忠孝東路五段246號5樓
教室連絡資訊
訂閱電子報
部落格
移動坦克方塊 | 樂高機器人EV3使用說明
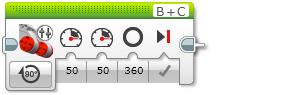
移動坦克方塊
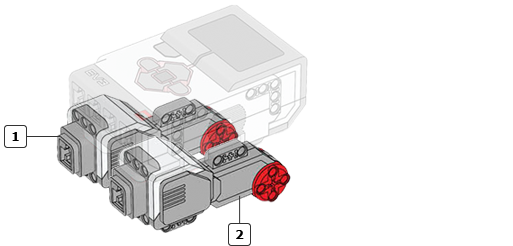
移動坦克方塊可以使機器人向前、向後驅動、轉向或停止。可對具有兩個大型馬達(一個馬達驅動車輛左側,另一個驅動右側)的機器人車輛使用移動坦克方塊。可以使兩個馬達以不同速度或不同方向運行,以便使機器人轉向。
左馬達
右馬達
提示和技巧
還可以通過
移動轉向
方塊控制具有兩個驅動馬達的機器人車輛。移動轉向方塊與移動坦克方塊類似,但是具有不同的轉向控制方式。
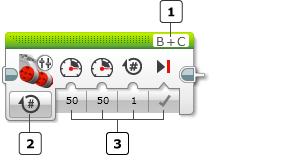
選擇馬達連接埠和控制模式
連接埠選擇
模式選擇
輸入
使用方塊頂部的
連接埠選擇
可選擇希望移動坦克方塊控制的兩個馬達(A、B、C 或 D)。單擊每個馬達字母可爲該馬達選擇連接埠第一個連接埠應是車輛左側的馬達,第二個連接埠應是右側的馬達。
提示和技巧
確保在使機器人面朝“前方”的情況下,左側的馬達是連接埠選擇上列出的第一個馬達。否則,機器人會以錯誤方向轉彎。
使用模式選擇可選擇要如何控制馬達。選擇模式之後,可以爲輸入選擇值。可用輸入會因模式而異。下面介紹了模式和輸入。
模式:
開啓
、
關閉
、
開啓指定秒數
、
開啓指定度數
、
開啓指定圈數
模式
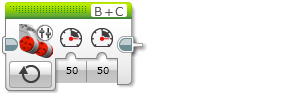
開啓
“開啓”模式會打開兩個馬達,然後立即繼續執行到程式中的下一個方塊。可以使用
左功率
和
右功率
輸入控制馬達的速度和方向。馬達會一直運行,直至由程式後面部分中的另一個方塊停止或更改,或是直至程式結束。
使用的
輸入
:
左功率
、
右功率
範例
當希望程式中的其他方塊控制馬達保持開啓狀態的時間長度時可使用“開啓”模式。在此程式中,機器人向前直線驅動。當壓下了觸碰感應器時,機器人會停止。
關閉
“關閉”模式會關閉兩個馬達。使用“關閉”模式可停止通過程式前面部分中的
開啓
模式啓動的機器人。請參考上面的範例。
如果
結束時剎車
爲“是”,則會立即停止馬達。馬達會保持在停止位置,直到另一個移動或馬達方塊啓動它們,或是直到程式結束。如果
結束時剎車
爲“否”,則僅僅關閉馬達的電源。馬達會使用所有剩餘動量慣性滑行,直到停止,或是直到另一個移動或馬達方塊啓動。
使用的
輸入
:
結束時剎車
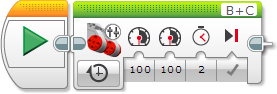
開啓指定秒數
“開啓指定秒數”將兩個馬達開啓
秒數
輸入中的秒數,然後關閉。方塊會等到這段時間經過,然後程式才繼續執行到下一個方塊。
可以使用
左功率
和
右功率
輸入控制機器人的速度和方向。使用
結束時剎車
可在恰好達到指定秒數之後停止機器人。
使用的
輸入
:
左功率
、
右功率
、
秒數
、
結束時剎車
範例
此程式會使機器人以完整功率向前直線驅動 2 秒,然後停止。
提示和技巧
可以在
秒數
輸入中使用小數點獲取精確時間量,如用於三秒半的 3.5 秒以及用於四分之一秒的 0.25 秒。
開啓指定度數
“開啓指定度數”會開啓兩個馬達,等到其中一個轉動“度數”輸入中的旋轉度數,然後關閉兩個馬達。這可以用於使機器人行進特定距離或按特定量轉向。360 度旋轉對應於馬達轉動一整圈。
可以使用
左功率
和
右功率
輸入控制機器人的速度和方向。使用
結束時剎車
可在恰好達到指定秒數之後停止機器人。
使用的
輸入
:
左功率
、
右功率
、
度數
、
結束時剎車
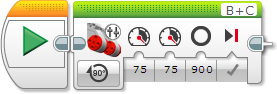
範例 1
此程式會使機器人以 75% 功率向前直線驅動,直至兩個馬達轉動了 900 度(兩圈半),然後停止。對
左功率
和
右功率
使用相同值會使機器人直線驅動。
提示和技巧
機器人將行進的距離取決於“度數”輸入。但是,該距離還取決於使用的驅動輪直徑及其他物理因素。馬達中的內部轉動感應器會測量馬達輪框處的圈數。
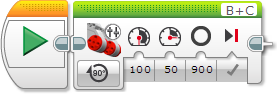
範例 2
下面的程式會使機器人向右以弧形轉向,因爲
左功率
大於
右功率
。轉向會持續到左馬達(處於外側且較快的馬達)恰好轉動 900 度,然後機器人會停止。
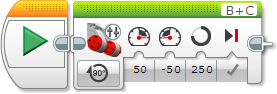
範例 3
此程式會通過使兩個馬達以不同方向轉動,來使機器人“自旋”。對
右功率
使用負數可使右馬達向後轉動。機器人會轉動,直至左馬達向前轉動了 250 度,然後機器人會停止。右馬達會向後轉動 250 度。
提示和技巧
請注意,“度數”輸入會測量向前或較快馬達的馬達位置量,而不是轉向時的機器人方向變化。機器人的方向變化取決於輪直徑、輪間距和其他因素。
開啓指定圈數
“開啓指定圈數”會開啓兩個馬達,等待其中一個轉動
圈數
輸入中的圈數,然後關閉兩個馬達。這可以用於使機器人行進特定距離或按特定量轉向。
可以使用
左功率
和
右功率
輸入控制機器人的速度和方向。使用
結束時剎車
可在恰好達到指定秒數之後停止機器人。
使用的
輸入
:
左功率
、
右功率
、
圈數
、
結束時剎車
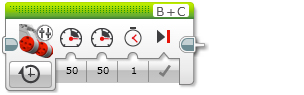
範例
此程式會使機器人以 50% 功率向前直線驅動(對
左功率
和
右功率
都使用 50),直至兩個馬達轉動了 3 整圈。它隨後向後直線驅動(使用負功率)3 圈,停在最初啓動位置處。
提示和技巧
開啓指定圈數
模式與
開啓指定度數
模式完全相同,只不過它使用不同的旋轉單位。也可以在
圈數
輸入中使用小數點來指定不完整的圈。以下範例演示獲取相同旋轉量的兩種不同方式:
圈數
度數
1
360
2
720
0.5
180
1.25
450
7.2
2592
馬達功率和方向
左功率
和
右功率
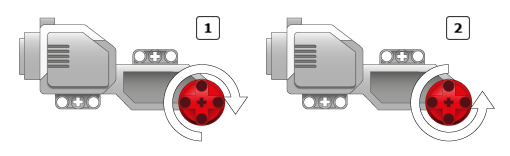
輸入接受介於 -100 至 100 之間的數字。正數和負數使大型馬達以不同方向轉動,如下圖所示。
正功率
負功率
可以使用
馬達反轉
方塊更改馬達的正常旋轉方向。如果反轉了馬達方向,則正和負功率級別的效果會與上面顯示的效果相反。
提示和技巧
馬達的旋轉速度與指定功率級別大致成比例,儘管旋轉速度也受馬達所承受的負載量影響。
輸入
移動坦克方塊的輸入控制著具體的馬達運行方式。可以將輸入值直接輸入到方塊中。或者,可以通過
資料線
從其他程式方塊的輸出提供值。可用輸入及其功能取決於選擇的控制模式。
輸入
類型
允許的值
備註
左功率
數字
-100 至 100
左馬達的馬達功率級別。
請參考
馬達功率和方向
。
右功率
數字
-100 至 100
右馬達的馬達功率級別。
請參考
馬達功率和方向
。
結束時剎車
邏輯
是/否
方塊完成時應用。
如果爲“是”,則馬達會立即停止並保持在原位。
如果爲“否”,則馬達電源停止,並允許馬達慣性滑行。
秒數
數字
≥ 0
以秒爲單位的移動時間。
度數
數字
任何數字
以度爲單位的移動量。360 度會旋轉一整圈。
圈數
數字
任何數字
以圈爲單位的移動量。
移動坦克
快速連結
選擇馬達連接埠和控制模式
模式
開啓
關閉
開啓指定秒數
開啓指定度數
開啓指定圈數
馬達功率和方向
輸入
返回EV3軟體文件 »