使用紅外線感應器“訊號”模式 | 樂高機器人EV3使用說明
使用紅外線感應器“訊號”模式
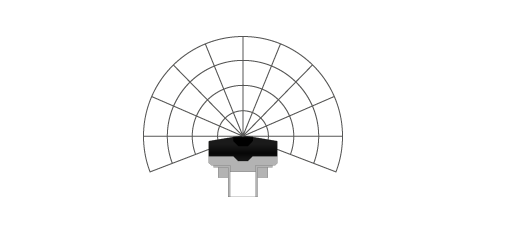
在“訊號”模式中,紅外線感應器可以檢測感應器前方的遠程紅外訊號(IR 訊號)的近似位置。感應器可以爲您提供訊號的近程(與感應器之間的相對距離)及其標頭(與感應器指向的方向之間的角度)。例如,可以使用“訊號”模式使機器人搜尋 IR 訊號並向著訊號驅動。
通過壓下 IR 訊號頂部的“訊號模式”按鈕來開啓訊號。LED 指示燈會開啓並保持開啓狀態。訊號會保持開啓狀態並連續發射,直至再次壓下“訊號模式”按鈕以關閉它。
從頻道選擇選擇四個頻道之一。紅外線感應器只會在程式中指定的頻道上檢測訊號。
從頻道選擇選擇四個頻道之一。紅外線感應器只會在程式中指定的頻道上檢測訊號。
| 資料 | 類型 | 值 | 備註 |
|---|---|---|---|
| 已檢測 | 邏輯 | 是/否 | 如果在指定頻道上檢測到 IR 訊號,則爲“是”,否則爲“否”。 |
| 近程 | 數字 | 0 至 100 | 與訊號之間的相對距離。0 表示非常接近,100 表示遙遠。如果完全未檢測到訊號,則近程爲 100。 |
| 標頭 | 數字 | -25 至 25 | 0 表示訊號位於感應器正前方,負值表示位於左側,正值表示位於右側。 |
提示和技巧
近程和標頭的值不直接對應於特定距離和角度。這些值取決於信號的強度和其他因素。
| 方塊 | 模式 | 用途 |
|---|---|---|
| 等待 | 紅外線感應器 - 比較 - 訊號標頭 | 等待檢測到訊號並等待標頭達到指定值。 |
| 等待 | 紅外線感應器 - 比較 - 訊號近程 | 等待檢測到訊號並等待近程達到指定值。 |
| 等待 | 紅外線感應器 - 更改 - 訊號標頭 | 等待訊號標頭按指定量更改。 |
| 等待 | 紅外線感應器 - 更改 - 訊號近程 | 等待訊號近程按指定量更改。 |
| 迴圈 | 紅外線感應器 - 訊號標頭 | 重覆方塊序列,直至訊號標頭達到指定值。 |
| 迴圈 | 紅外線感應器 - 訊號近程 | 重覆方塊序列,直至訊號近程達到指定值。 |
| 選擇 | 紅外線感應器 - 訊號標頭 | 根據訊號標頭在兩個方塊序列之間進行選擇。 |
| 選擇 | 紅外線感應器 - 訊號近程 | 根據訊號近程在兩個方塊序列之間進行選擇。 |
| 紅外線感應器 | 測量 - 訊號 | 通過數字資料線獲取訊號標頭和近程,並通過邏輯資料線獲取“已檢測”狀態。 |
| 紅外線感應器 | 比較 - 訊號標頭 | 將訊號標頭與預設值進行比較,並通過邏輯資料線獲取結果。 |
| 紅外線感應器 | 比較 - 訊號近程 | 將訊號近程與預設值進行比較,並通過邏輯資料線獲取結果。 |