2015台北市機器人大賽創意賽 宜居城市-智慧運輸 國中組第一名
參賽學生
敦化國中8年級: 陳致杰、鄧書賢

摘要
避免十字路口常發生交通事故,或因駕駛習慣而造成交通塞車,透過樂高EV3主機、Arduino電子電路及樂高人偶相互連結,模擬智慧車、路口仲裁系統和行人路權,運用我們的創意和想法提升公共服務設施智能化。
寫軟體程式的過程中,使用PID(比例、積分、微分)控制方法,使智慧型自走車循跡更穩定,再透過Wi-Fi的方式建立通訊來連接Arduino和EV3,模擬並試著讓十字路口的交通更有效率,達到宜居城市中的智慧交通。
壹、創作動機
全球都市人口密集度不斷提升的狀況下,自用車使用率增加是導致交通堵塞的主要原因,為增加運輸效率,紅綠燈的仲裁方式成為我們主要改善的目標;由於自用車的方便,導致市區內車流日益升高,每逢尖峰時間,上班、旅遊或是購物的車流從四面八方湧入市中心,常見到許多車爭先恐後的想節省時間,因此我們選擇了交通作為研究主題,改善交通壅塞、路口通行時間浪費等問題。
貳、創作目的
模擬現實中的三個情境並加以改善達到智慧交通,希望可以透過智慧交通的方式節省時間,進一步減少汙染、交通事故,提昇行車安全;藉由先進交通控制系統,可有效減少延滯及旅行時間,提昇道路服務品質,打造一個更適合居住的城市。
建立三個使用者情境,探索以下問題:
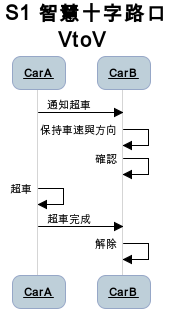
第一個使用者情境(S1)─車對車通訊(V to V):透過藍芽連線,建立兩台車間直接的通訊,模擬現有車載通訊系統(DRSC),藉此增加超車時的行車安全。現實中,前車往往不知道後車要進行超車動作,在模擬中,後車會主動通知前車要進行超車,後車超車時,前車保持安全速度及行車方向,確保超車過程更安全。
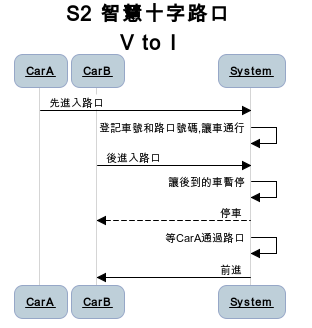
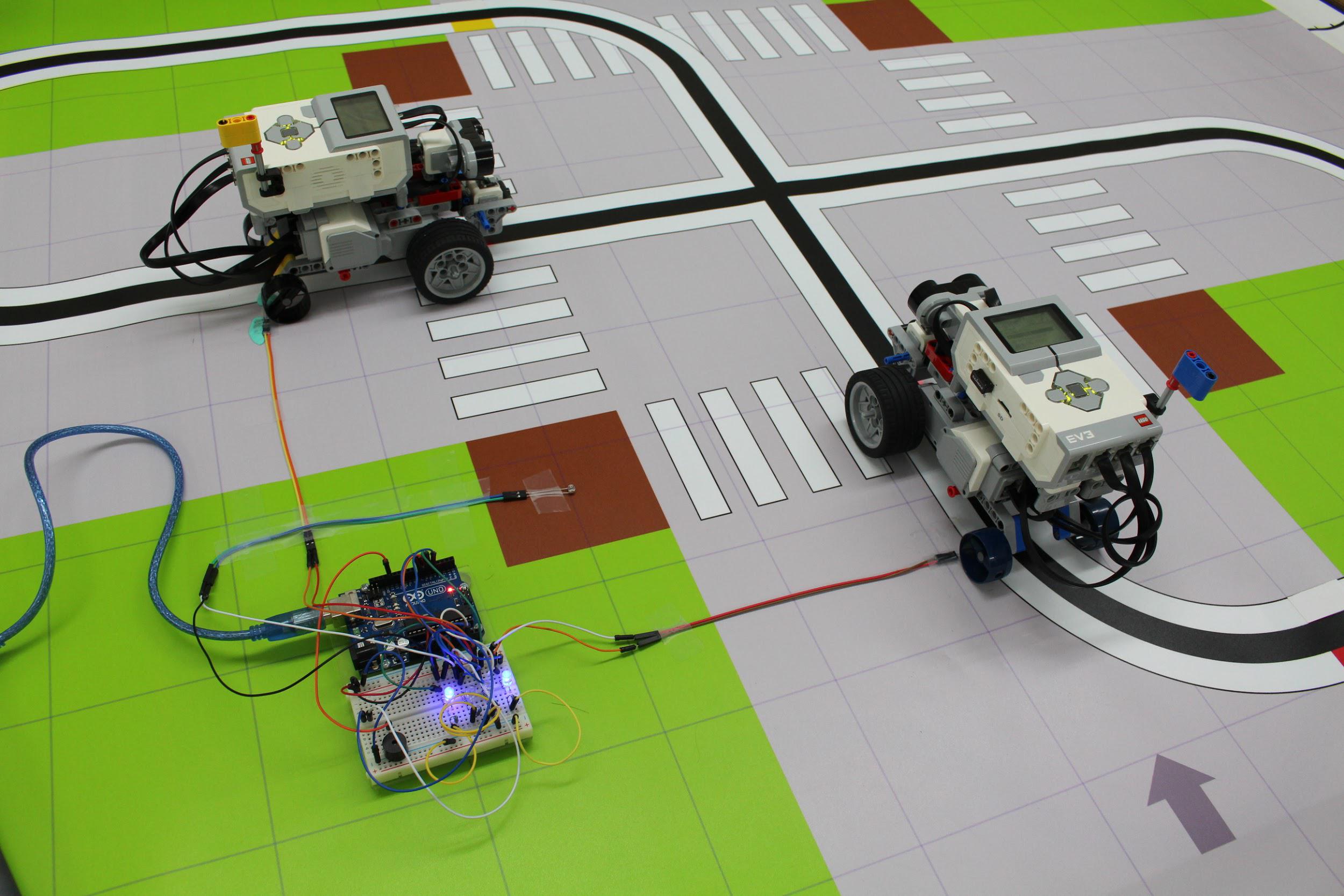
第二個使用者情境(S2)─車對路通訊(V to R):在道路上使用Arduino設置光敏電阻,路口系統可感應車輛經過,並透過Wi-Fi將EV3和Arduino連線,模擬車載通訊系統,Arduino、EV3分別為系統和車輛,Arduino透過光敏電阻可知車輛進入路口的先後順序,並仲裁路口車輛通行的先後順序。
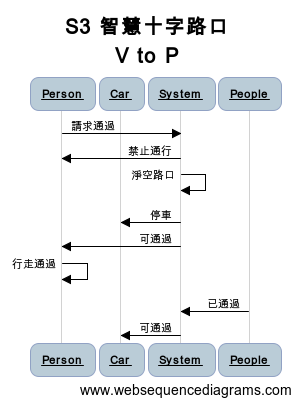
第三個使用者情境(S3)─車對人通訊(V to P):想讓行人更安全、便捷的通過路口,於是改善紅綠燈的計時系統,當人進入路口時請求通行,系統通知並淨空路口的車輛後,即讓行人通過,以改善傳統紅綠燈沒車時還要等紅燈的情形。
參、設備及器材
樂高EV3主機兩台(Wi-Fi網卡兩張)
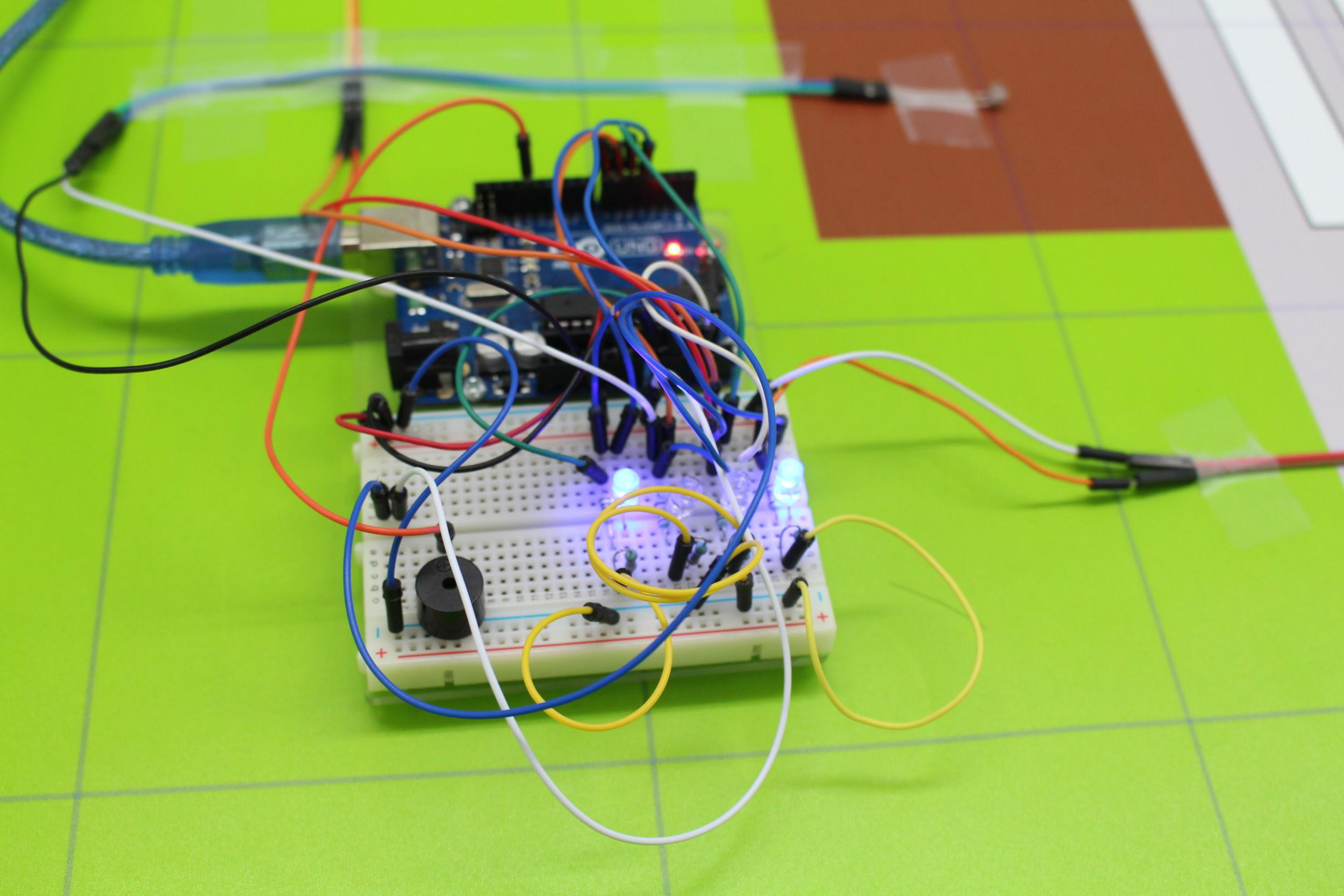
Arduino Uno 、精密電阻、光敏電阻(光感應器)、蜂鳴器
肆、創作的過程
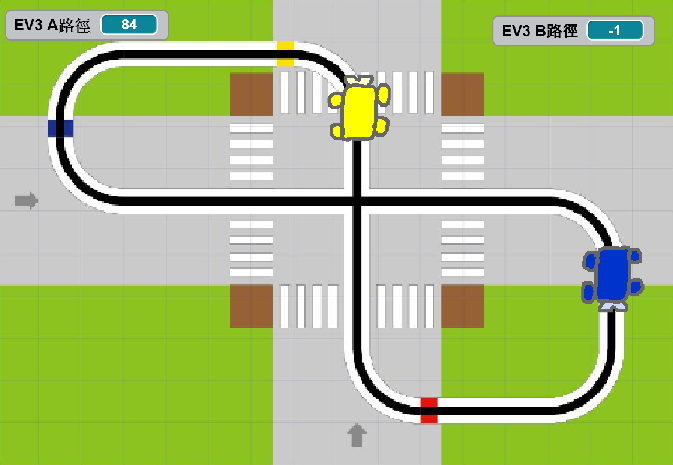
將路段劃分一百等分, 兩台智慧型自走車,Car1從黃色、Car2從綠色起始點出發,黃色點為路段的百分之零 ,綠色點為百分之五十五,系統透過連線取得兩台車在路段上的位置。
第一個使用者情境(S1) ─ 車對車通訊(V to V):情境一(圖A)Car2先通知Car1準備超車,Car1保持相同速度並通知Car2是否可以超車,Car2完成超車完成後解除車速限制。
第二個使用者情境(S2)─車對路通訊(V to R):情境二(圖B)Car1在進入路口時,系統用光敏電阻偵測Car1並登記車號,緊接著Car2進入路口,系統通知Car2停車等待, Car1先行通過,待Car1順利通過路口後,系統下達Start命令通知Car2通行。
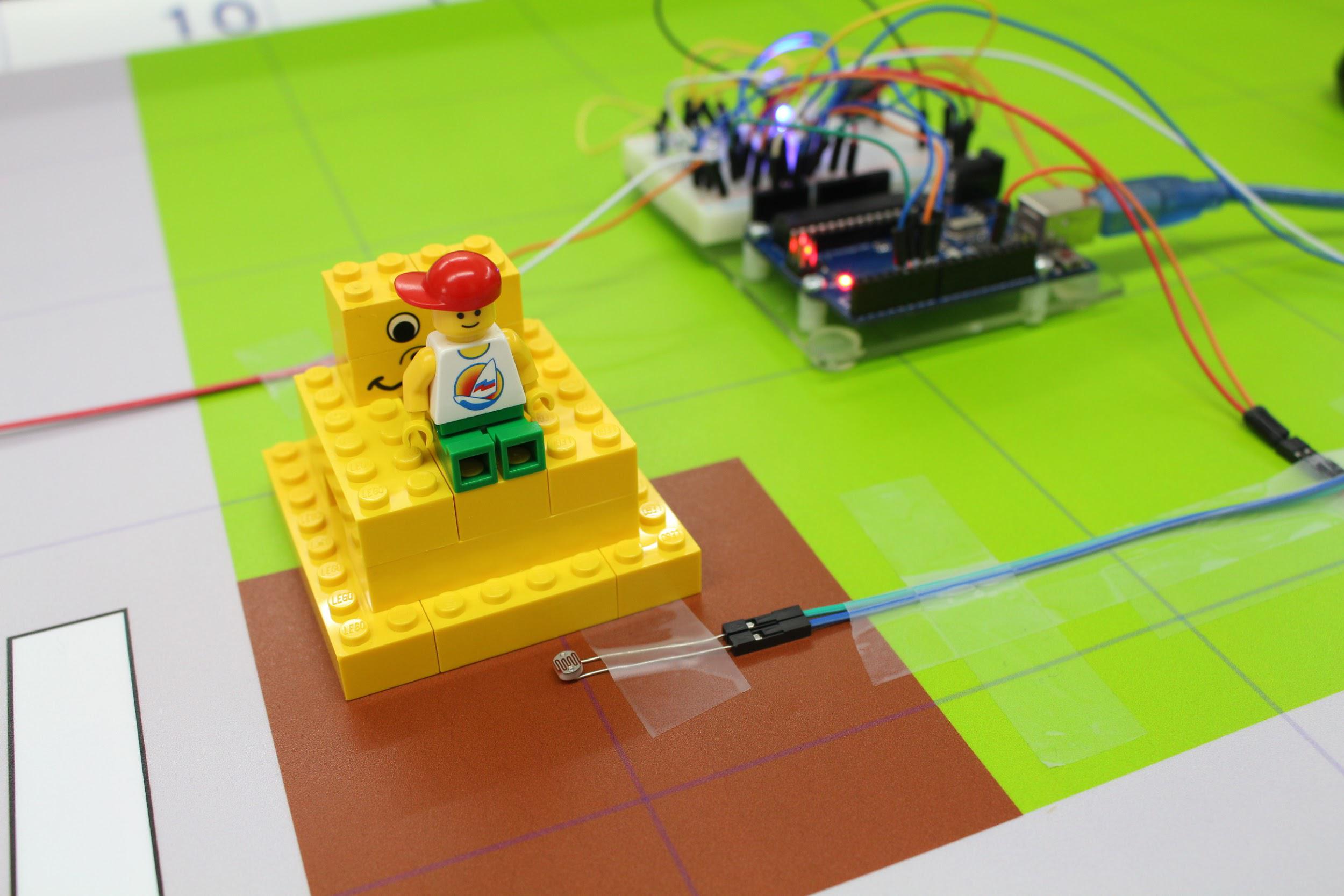
第三個使用者情境(S3)─車對人通訊(V to P):情境三(圖C)在路口放置一個光敏電阻,當行人(圖D)抵達路口時會蓋住光敏電阻,使系統偵測到行人進入路口,同時向系統要求通過,此時系統禁止行人通過,透過連線命令路口車輛停止,路口淨空後,會通知行人通行,行人通過後系統通知車輛可以通行。
伍、創作結果
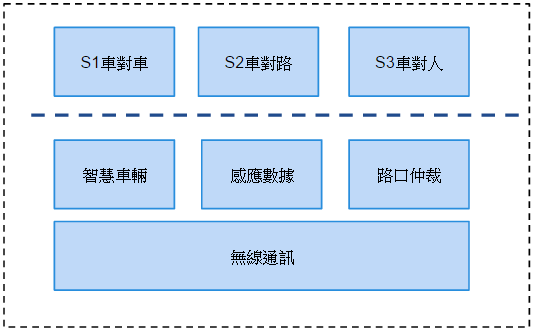
一、無線通訊:透過藍芽和Wi-Fi通訊,將多台車與系統連結 。
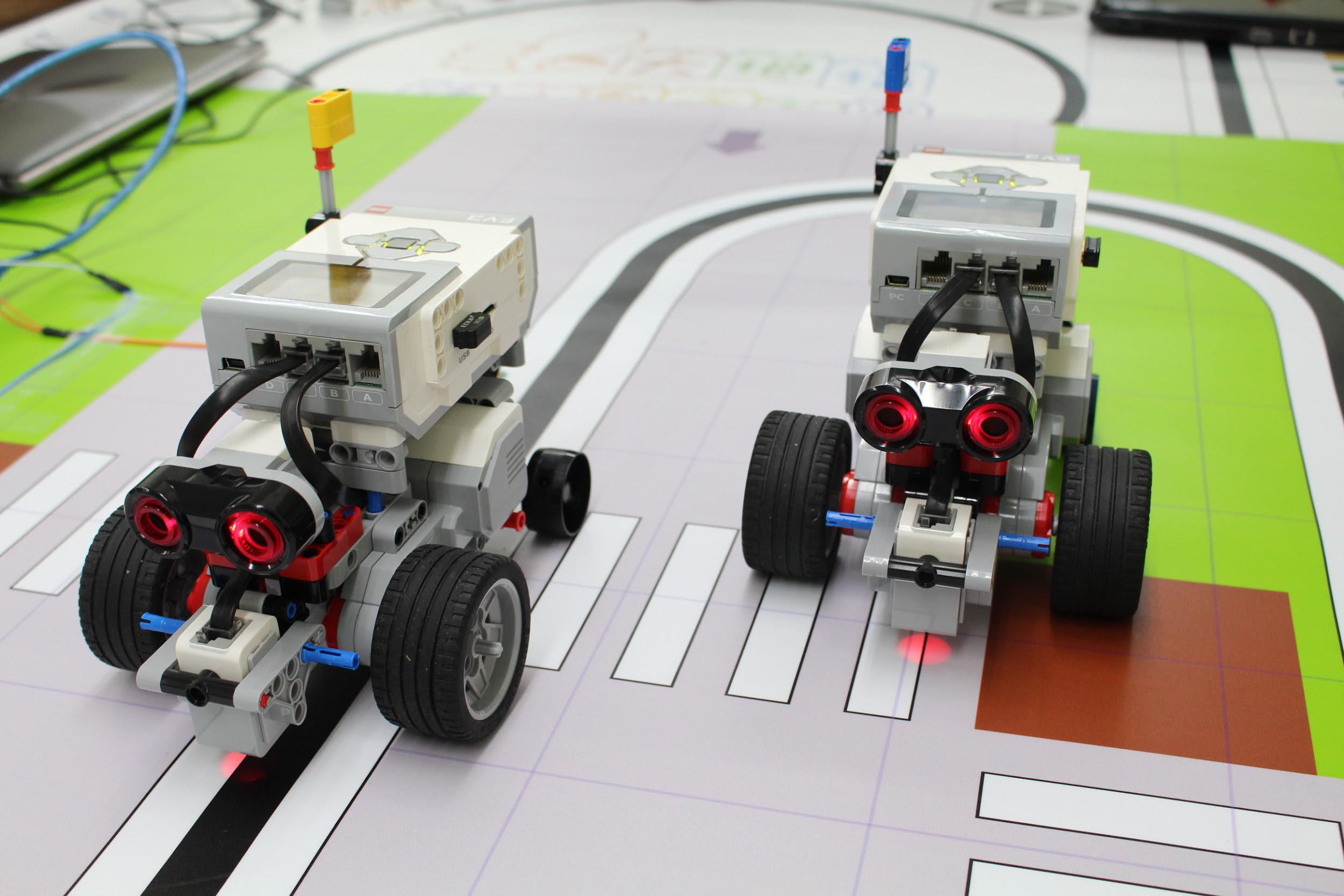
二、智慧車輛:車頭裝有超音波感應器 ,當前方有障礙物時會立即減速停車。
三、感應數據:十字路口(圖E)的兩端裝有光敏電阻可以偵測路口是否有車輛進入,車上的光源感應器可以讓車沿著路線走。
四、Arduino的每個光源感應器都串接了一個光敏電阻和一個固定電阻,透過光敏電阻在不同亮度下改變電壓的原理來讀取光源數值,數值範圍大概在0~800間,只要低於650,系統就判定有行人或車輛經過。
路口仲裁:偵測Car1、Car2哪輛車先進路口,並發訊息命令兩台車通行或停止。
五、路口仲裁:偵測Car1、Car2哪輛車先進路口,並發訊息命令兩台車通行或停止。
六、虛線以上是設定的三個情境:S1的情境是車對車超車,S2是十字路口透過仲裁管理通行的先後順序,S3是行人穿越路口的情境。
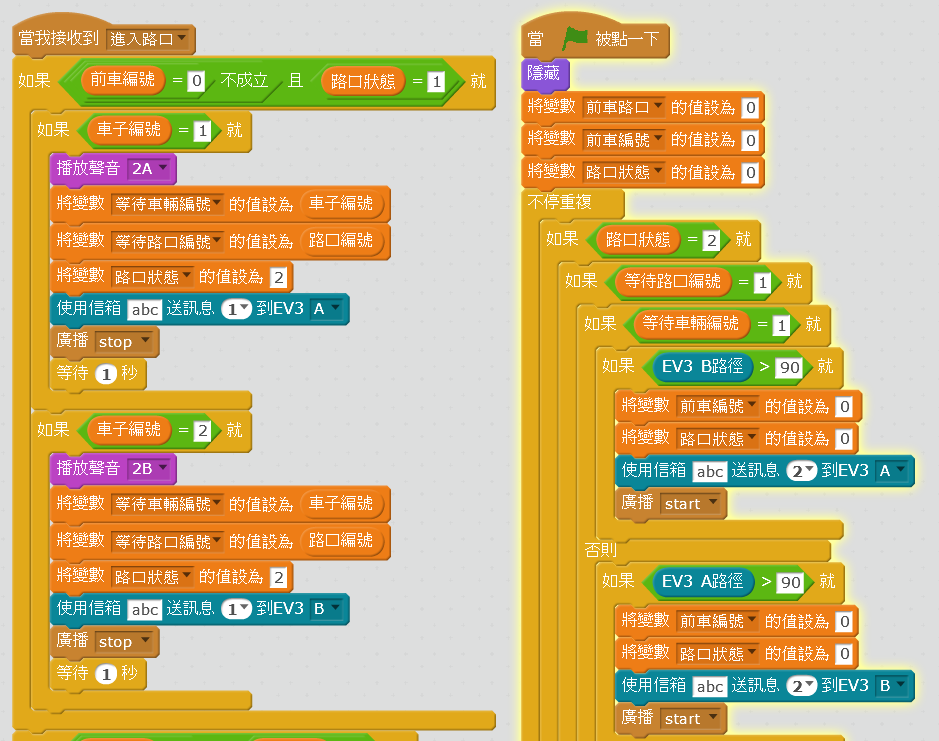
七、Scratch程式(圖F):左半的程式是第一台車和第二台車進入路口的狀態,當光敏電阻偵測到第一台車進入路口的時候,第二台車就要等待第一台車通過路口才能通行。右半的程式是路口仲裁的四種狀況。
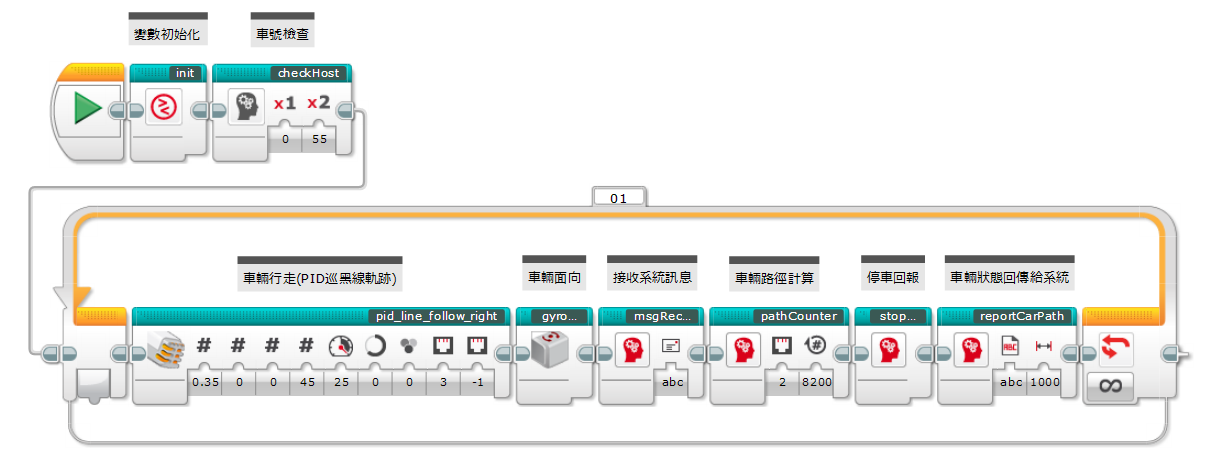
八、情境一Car1主要程式(圖G):Car1先與Car2建立連線,開始循跡時收到Car2的超車通知後保持速度與方向,並通知Car2可進行超車。

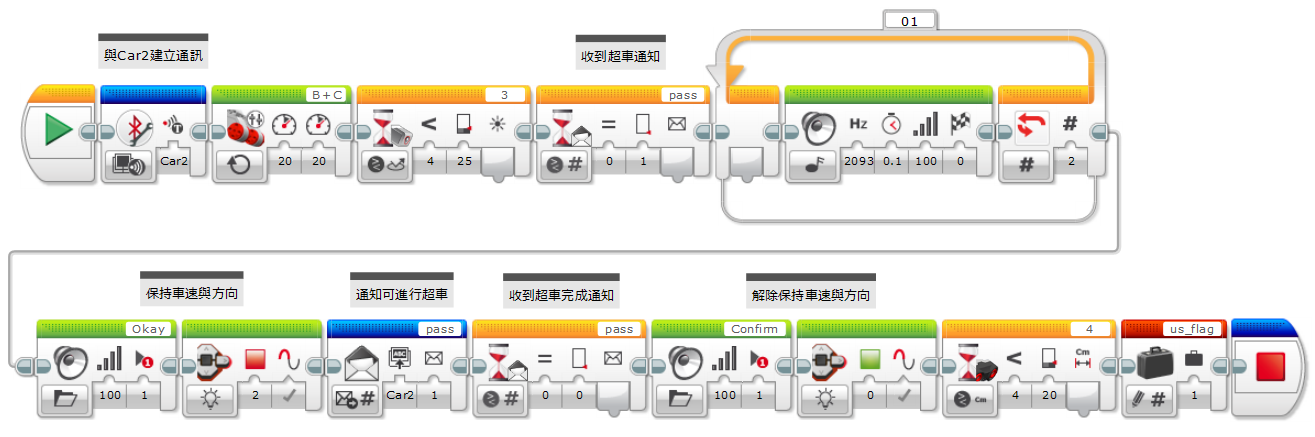
九、情境一Car2主要程式(圖H):與Car1建立連線後傳送超車通知並等待回應,收到通知後進行超車,超車完成傳送訊息給Car1。
九、情境一Car2主要程式(圖H):與Car1建立連線後傳送超車通知並等待回應,收到通知後進行超車,超車完成傳送訊息給Car1。
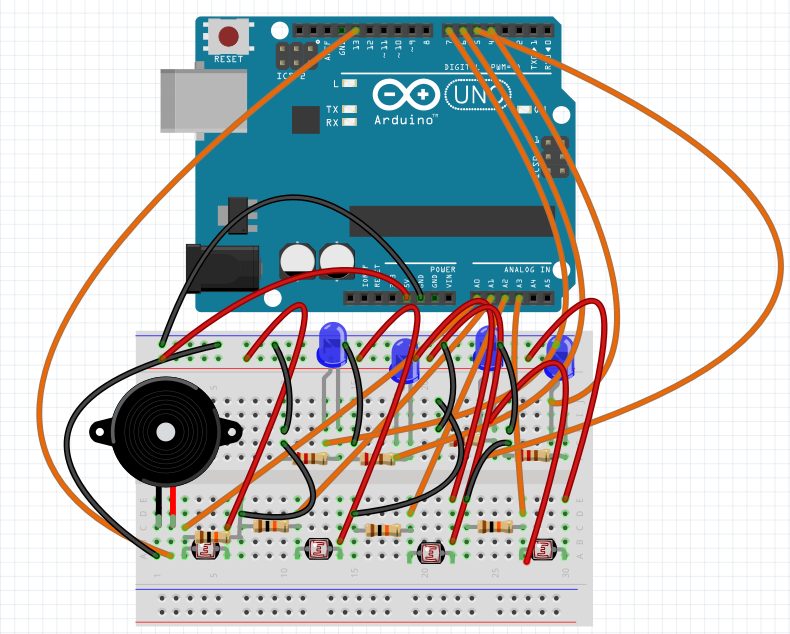
十一、Arduino線路圖(圖J): 蜂鳴器接在腳位13,當開機和連線時會發聲,光敏電阻接在腳位A1、A2、A3設置在路口的西、南兩側和人行道,感應車輛和行人,燈和光敏電阻串連,用來辨識光敏電阻的感應狀態。
陸、討論
透過研究智慧交通的主題模擬,找到許多關於車載通訊(DSRC)、智慧型運輸系統(ITS)等相關內容,並思考如何做出模擬系統,更深入了解這個問題。
電子電路:過程中學會接Arduino的電路,不小心接錯就會造成很多的變動,所以要小心翼翼看好每一條電路才能下手。
學習Scratch程式:雖然以前用過幾次但不熟練,經老師指導後,漸漸能夠順利的把程式完成。
EV3 程式 :寫程式的過程中有許多數據是要自己測試的,程式中也有許多需要修正的地方,經過老師的指導並反覆測試找出問題,使問題排解的能力更加進步。
PID控制:第一次看到這個公式時,覺得很複雜,但經過老師的講解後,漸漸了解什麼是微分及積分,並經過改變數值做實驗,現在能夠使用這種方式控制馬達,比以前會的循跡方式穩定許多。
Wi-Fi和藍芽通訊:透過藍芽連線讓兩台車互相傳送訊息。這是我們第一次用Wi-Fi連接EV3和個人電腦,使傳送訊息的時間大幅縮短。
流程圖繪製:在這次的實作中,運用流程圖來做團隊間工作討論,大幅縮短了討論的時間;並且讓程式設計時,腦中的藍圖更加清晰。
未來世界的想像:若由電腦來控制車輛行走,並與道路上的系統設備互相連結,讓交通更有效率及安全,司機工作在未來可能被取代,但也可能出現更多工程開發或資訊工程師等工作內容。
現實中的應用:這次的作品在真實世界中並不一定能正常運作,因為有很多的環境問題要考量,像太陽光的強弱對感測器影響,也讓我們了解到許多環境的變因及問題處理的應變能力。
柒、參考資料及其他
- 高根英幸,汽車最新高科技。黃郁婷譯。晨星出版社, 2011。
- VANET 分層式網路架構路由研究 http://140.127.82.166/retrieve/12609/4.pdf
- 未來城市:虛擬紅綠燈系統可望節省都會區40%通勤時間 http://www.ithome.com.tw/news/93625
- Development of Traffic Information Systems Using DSRC Technology for the Work-Zone Environment。http://www.ops.fhwa.dot.gov/wz/p2p/pmwkshop053013/hayee/hayee.htm