使用陀螺儀感應器 | 樂高機器人EV3使用說明
使用陀螺儀感應器
 |
陀螺儀感應器檢測旋轉運動。如果按感應器外殼上的箭頭方向旋轉陀螺儀感應器,則感應器可以檢測旋轉速率(以度/秒爲單位)。例如,可以使用旋轉速率檢測機器人的一部分進行轉動的時間,或是機器人倒下的時間。 此外,陀螺儀感應器會跟蹤總旋轉角度(以度爲單位)。例如,可以使用此旋轉角度檢測機器人的轉動距離。 |
| 資料 | 類型 | 備註 |
|---|---|---|
| 角度 | 數字 | 旋轉角度(以度爲單位)。 相對於上次重置進行測量。使用陀螺儀感應器方塊的“重置”模式進行重置。 |
| 速率 | 數字 | 旋轉速率(以度/秒爲單位)。 |
提示和技巧

提示和技巧
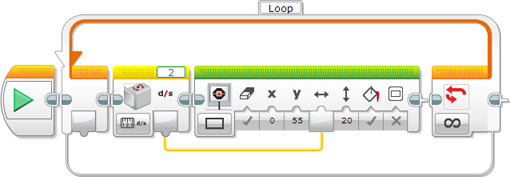
提示:因爲上面的程式使用等待方塊的“更改”模式,所以它測量相對於等待方塊開始時的角度變化。因此,在移動之前無需重置陀螺儀感應器。