使用顔色感應器 | 樂高機器人EV3使用說明
使用顔色感應器

提示和技巧
當顔色感應器處於“顔色”模式時,感應器正面的紅色、綠色和藍色 LED 指示燈會開啓。
感應器可以檢測七種不同顔色:黑色、藍色、綠色、黃色、紅色、白色和棕色。不是這些顔色之一的物體可能會檢測爲“無顔色”,或可能檢測爲相似顔色。例如,橙色物體可能檢測爲紅色或黃色(具體取決於橙色所含紅色的程度),如果橙色非常深或是距離感應器太遠,則可能檢測爲棕色或黑色。
提示和技巧
物體或表面應非常接近於感應器(但不接觸它)以便準確檢測。
在“反射光線強度”模式中,顔色感應器會檢測進入感應器的光線的強度。光線的強度測量爲從 0 至 100 的百分比,其中 0 表示非常暗,100 表示非常亮。
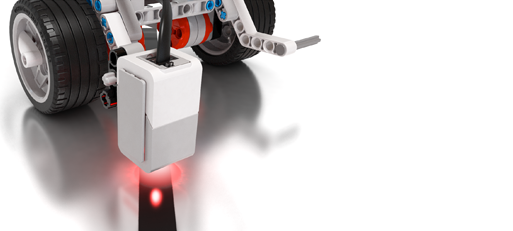
當顔色感應器處於“反射光線強度”模式時,感應器正面的紅色 LED 指示燈會開啓。如果感應器接近於物體或表面,則此紅色光線會從物體上反射,然後進入要檢測的感應器。可以使用此方法測量表面或物體上的顔色陰影,因爲較暗顔色陰影會將較少紅色光線反射回感應器。
例如,可以使用此模式使機器人跟隨白色表面上的黑色線。當感應器越過黑色線時,光線測量會隨著感應器越來越接近黑色線而逐漸減小。這可以用於告知機器人與線的接近程度。
當顔色感應器處於“反射光線強度”模式時,感應器正面的紅色 LED 指示燈會開啓。如果感應器接近於物體或表面,則此紅色光線會從物體上反射,然後進入要檢測的感應器。可以使用此方法測量表面或物體上的顔色陰影,因爲較暗顔色陰影會將較少紅色光線反射回感應器。
例如,可以使用此模式使機器人跟隨白色表面上的黑色線。當感應器越過黑色線時,光線測量會隨著感應器越來越接近黑色線而逐漸減小。這可以用於告知機器人與線的接近程度。
提示和技巧
| “反射光線強度”模式測量進入感應器的光線總量。這包括紅色 LED 的反射以及房間中的任何光線。感應器位置應接近於(但不接觸)所測量的表面,以減小外部光源的影響。 |
在“環境光強度”模式中,與“反射光線強度”模式一樣,顔色感應器會檢測進入感應器的光線的強度。光線的強度測量爲從 0 至 100 的百分比,其中 0 表示非常暗,100 表示非常亮。
在“環境光強度”模式中,感應器正面的藍色 LED 指示燈會微弱開啓。此藍色指示燈可幫助識別感應器處於“環境光強度”模式,但是不影響光線測量,除非物體非常接近於感應器。
可以使用此模式檢測房間燈的亮度,或是其他光源照射到感應器的時間。還可以使用此模式檢測房間中燈的開啓時間或是手電筒照射到機器人的時間。

在“環境光強度”模式中,感應器正面的藍色 LED 指示燈會微弱開啓。此藍色指示燈可幫助識別感應器處於“環境光強度”模式,但是不影響光線測量,除非物體非常接近於感應器。
可以使用此模式檢測房間燈的亮度,或是其他光源照射到感應器的時間。還可以使用此模式檢測房間中燈的開啓時間或是手電筒照射到機器人的時間。
| 資料 | 類型 | 範圍 | 備註 |
|---|---|---|---|
| 顔色 | 數字 | 0-7 | 在“顔色”模式中使用。 0 = 無顔色 1 = 黑色 2 = 藍色 3 = 綠色 4 = 黃色 5 = 紅色 6 = 白色 7 = 棕色 |
| 光線 | 數字 | 0-100 | 在“反射光線強度”和“環境光強度”模式中使用。以百分比形式測量光線強度,0 = 最暗,100 = 最亮。 |

提示和技巧
如果在機器人上的顔色感應器向下指並接近於帶有粗黑線的淺色表面的情況下使用此程式,則機器人可以驅動至達到該線。

提示和技巧
與上面範例 1 中的方法相比,此程式允許您通過更改預設值(此處爲 50%)來調整線的所需濃度。機器人還會在任何深色(而不僅是黑色)處停止。
範例 3:僅當房間燈開啓時驅動
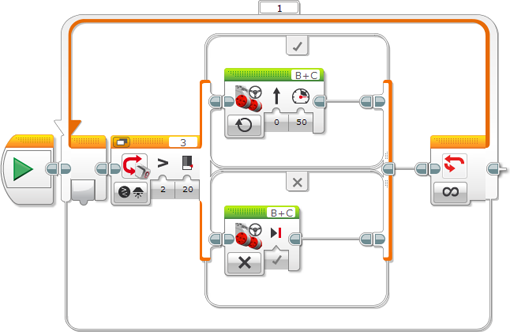
此程式使機器人在房間燈開啓時驅動,在關閉燈時停止。此程式將選擇與“顔色感應器 - 比較 - 環境光強度”模式一起使用以測試光線是否強於 20%。“選擇”選擇是開啓還是關閉馬達。“選擇”在迴圈中重覆執行,以便機器人持續響應光線變化。
範例 4:檢測到時說出“Red”、“Green”和“Blue”
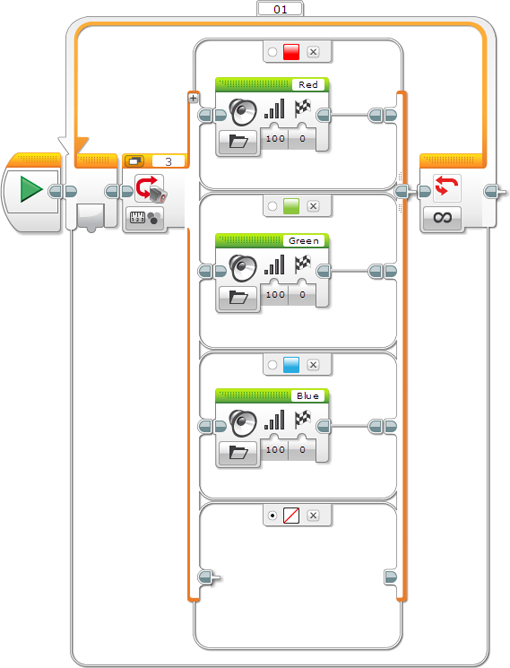
此程式使 EV3 在顔色感應器檢測到這些顔色時說出“Red”、“Green”和“Blue”。此程式在“顔色感應器 - 測量 - 顔色”模式中使用選擇,根據檢測到的顔色選擇不同聲音方塊。會將“無顔色”情況作爲預設情況增加並選擇,這樣 EV3 在未看到三種顔色的任一種時不會提示任何內容。
範例 5:顯示反射光線計
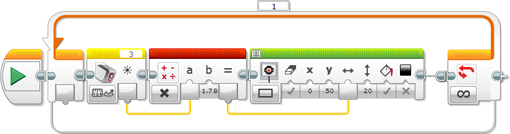
此程式將圖形光線計置於 EV3 顯示畫面上。此程式在“測量 - 反射光線強度”模式中使用顔色感應器方塊測量反射光線 (0-100) 並通過資料線獲取結果。結果隨後會乘以 1.78 以將其縮放爲 EV3 螢幕寬度(178 像素),然後用作實心矩形形狀的寬度。該過程在迴圈中重覆執行,以便持續更新顯示畫面。
提示和技巧
在運行此程式時,嘗試移動顔色感應器經過不同顔色和陰影的表面。將能夠看到哪些顔色的反射更亮。
| 方塊 | 模式 | 用途 |
|---|---|---|
| 等待 | 顔色感應器 - 比較 - 顔色 | 等待感應器檢測到所選顔色之一。 |
| 等待 | 顔色感應器 - 比較 - 反射光線強度 | 等待反射光線強度達到特定值。 |
| 等待 | 顔色感應器 - 比較 - 環境光強度 | 等待環境光強度達到特定值。 |
| 等待 | 顔色感應器 - 更改 - 顔色 | 等待檢測到的顔色更改。 |
| 等待 | 顔色感應器 - 更改 - 反射光線強度 | 等待反射光線強度按特定量更改。 |
| 等待 | 顔色感應器 - 更改 - 環境光強度 | 等待環境光強度按特定量更改。 |
| 迴圈 | 顔色感應器 - 顔色 | 重覆方塊序列,直至檢測到所選顔色之一。 |
| 迴圈 | 顔色感應器 - 反射光線強度 | 重覆方塊序列,直至反射光線強度達到特定值。 |
| 迴圈 | 顔色感應器 - 環境光強度 | 重覆方塊序列,直至環境光強度達到特定值。 |
| 選擇 | 顔色感應器 - 測量 - 顔色 | 根據檢測到的顔色在兩個或更多不同方塊序列中選擇。 |
| 選擇 | 顔色感應器 - 比較 - 顔色 | 根據是否檢測到所選顔色之一在兩個方塊序列中選擇。 |
| 選擇 | 顔色感應器 - 比較 - 反射光線強度 | 根據反射光線強度在兩個方塊序列中選擇。 |
| 選擇 | 顔色感應器 - 比較 - 環境光強度 | 根據環境光強度在兩個方塊序列中選擇。 |
| 顔色感應器 | 測量 - 顔色 | 測量檢測到的顔色 (0-7) 並通過數字資料線獲取結果。 |
| 顔色感應器 | 測量 - 反射光線強度 | 測量反射光線強度 (0-100) 並通過數字資料線獲取結果。 |
| 顔色感應器 | 測量 - 環境光強度 | 測量環境光強度 (0-100) 並通過數字資料線獲取結果。 |
| 顔色感應器 | 比較 - 顔色 | 將檢測到的顔色與一個或多個所選顔色進行比較,並通過邏輯資料線獲取結果(如果它與任何所選顔色匹配,則爲“是”)。 |
| 顔色感應器 | 比較 - 反射光線強度 | 將反射光線強度與預設值進行比較,並通過邏輯資料線獲取結果。 |
| 顔色感應器 | 比較 - 環境光強度 | 將環境光強度與預設值進行比較,並通過邏輯資料線獲取結果。 |
| 資料記錄 | 請參考“資料記錄”。 |