陀螺儀感應器方塊 | 樂高機器人EV3使用說明
陀螺儀感應器方塊
 |
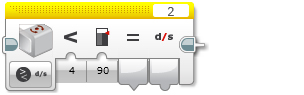
陀螺儀感應器方塊從陀螺儀感應器獲取資料。可以測量旋轉速率或旋轉角度並獲取數字輸出。還可以將感應器資料與預設值進行比較以獲取邏輯(“是”或“否”)輸出。 有關陀螺儀感應器的作用、它提供的資料以及程式範例的更多資訊,請參考使用陀螺儀感應器。 |
模式




提示和技巧
通過隨時間重覆增加旋轉速率讀數來計算旋轉角度。旋轉速率的微小誤差會隨時間而累加,從而導致旋轉角度“偏移”。將旋轉角度重置爲 0 會清除誤差,並爲將來的角度測量定義新起始點。
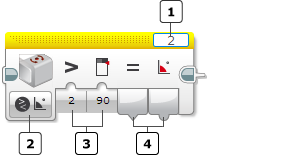
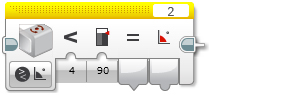
可用於陀螺儀感應器方塊的輸入取決於所選模式。可以將輸入值直接輸入到方塊中。或者,可以通過資料線從其他程式方塊的輸出提供輸入值。
| 輸入 | 類型 | 允許的值 | 備註 |
|---|---|---|---|
| 比較類型 | 數字 | 0 - 5 | 0:=(等於) 1:≠(不等於) 2:>(大於) 3:≥(大於或等於) 4:<(小於) 5:≤(小於或等於) |
| 預設值 | 數字 | 任何數字 | 要將感應器資料與之進行比較的值 |
可用輸出取決於所選模式。要使用某個輸出,請使用資料線將該輸出連接到另一個程式方塊。